人工智能导论 - 用C语言和A*算法解决15数码问题
人工智能导论实验1:用C语言和A*算法解决15数码问题
首先是分析理论基础(可达性与启发函数),然后是完整的 C 语言实现代码,最后是对算法性能的分析和可视化示例。
0. 实验要求#
使用C语言解决15数码问题;将问题求解改写为搜索问题。设置起点和目标,使用 A* 算法实现。比较不同的启发策略,分析 A* 算法和代价函数选择间的关系。注意判断初始局面和目标之间的可达性;需要以可视化方式呈现搜索过程。
1. 理论基础与策略#
A. 可达性判断 (Solvability)#
并不是任意两个 15 数码的局面都是相互可达的。为了避免程序陷入死循环,必须先进行奇偶性校验。 对于 的网格():
- 逆序数 (Inversions): 将矩阵铺平(不包含空格),计算前面比后面大的数字对的个数。
- 判断公式: 如果 是偶数(15数码中 ),当且仅当下面条件满足时,初始状态可达目标状态(假设目标状态逆序数为0): 逆序数 + 空格所在行号(从下往上数)是偶数 (注:如果两个状态都有逆序数,则需判断它们的奇偶性变换是否一致)
B. 启发式策略 (Heuristics)#
A* 算法的核心公式是 。
- : 从起点到当前节点的实际代价(步数)。
- : 当前节点到目标的预估代价。
我们将比较两种策略:
- 不在位棋子数 (Misplaced Tiles): 统计当前局面与目标局面数字位置不一致的个数。
- 曼哈顿距离 (Manhattan Distance): 所有数字当前位置与目标位置的横纵坐标差的绝对值之和。
h(n) = \sum |x{current} - x{goal}| + |y{current} - y{goal}|
2. C 语言代码实现#
这段代码实现了一个包含 最小堆 (Priority Queue) 和 哈希查重 (Hash Set) 的 A* 算法。为了实现“可视化”,我编写了一个播放函数,在终端中通过刷新屏幕演示解题步骤。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include <time.h>
#ifdef _WIN32
#include <windows.h>
#define CLEAR_CMD "cls"
#define SLEEP_MS(x) Sleep(x)
#else
#include <unistd.h>
#define CLEAR_CMD "clear"
#define SLEEP_MS(x) usleep((x)*1000)
#endif
#define N 4
#define MAX_NODES 500000 // 最大搜索节点池,防止内存溢出
// 方向数组:上下左右
int dx[] = {-1, 1, 0, 0};
int dy[] = {0, 0, -1, 1};
char move_char[] = {'U', 'D', 'L', 'R'};
// 目标状态 (0 表示空格)
int goal[N][N] = {
{1, 2, 3, 4},
{5, 6, 7, 8},
{9, 10, 11, 12},
{13, 14, 15, 0}
};
typedef struct Node {
int board[N][N];
int x, y; // 空格位置
int g, h, f;
struct Node* parent;
int hash; // 用于查重
} Node;
// 最小堆结构
typedef struct {
Node* elements[MAX_NODES];
int size;
} MinHeap;
// 哈希表 (简单链地址法可优化,这里用简单的数组模拟CloseList的大容量查找)
// 为简化代码,这里使用大数组+简单Hash。实际工程应使用链表处理冲突。
#define HASH_SIZE 1000003
Node* visited[HASH_SIZE];
// --- 辅助函数 ---
int abs_val(int x) { return x < 0 ? -x : x; }
// 计算曼哈顿距离 (启发策略 2)
int calc_manhattan(int board[N][N]) {
int dist = 0;
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
int val = board[i][j];
if (val == 0) continue;
// 目标位置计算: val-1 对应的坐标
int target_r = (val - 1) / N;
int target_c = (val - 1) % N;
dist += abs_val(i - target_r) + abs_val(j - target_c);
}
}
return dist;
}
// 计算不在位棋子数 (启发策略 1)
int calc_misplaced(int board[N][N]) {
int count = 0;
for(int i=0; i<N; i++) {
for(int j=0; j<N; j++) {
if(board[i][j] != 0 && board[i][j] != goal[i][j]) {
count++;
}
}
}
return count;
}
// 生成哈希值
int get_hash(int board[N][N]) {
unsigned int h = 0;
for (int i = 0; i < N; i++)
for (int j = 0; j < N; j++)
h = h * 31 + board[i][j];
return h % HASH_SIZE;
}
// --- 堆操作 ---
void push(MinHeap* heap, Node* node) {
int i = heap->size++;
while (i > 0) {
int p = (i - 1) / 2;
if (heap->elements[p]->f <= node->f) break;
heap->elements[i] = heap->elements[p];
i = p;
}
heap->elements[i] = node;
}
Node* pop(MinHeap* heap) {
Node* ret = heap->elements[0];
Node* x = heap->elements[--heap->size];
int i = 0;
while (i * 2 + 1 < heap->size) {
int a = i * 2 + 1, b = i * 2 + 2;
if (b < heap->size && heap->elements[b]->f < heap->elements[a]->f) a = b;
if (heap->elements[a]->f >= x->f) break;
heap->elements[i] = heap->elements[a];
i = a;
}
heap->elements[i] = x;
return ret;
}
// --- 可解性判断 ---
int is_solvable(int board[N][N]) {
int inv_count = 0;
int arr[N * N];
int k = 0;
int empty_row = 0;
for (int i = 0; i < N; i++)
for (int j = 0; j < N; j++) {
if (board[i][j] == 0) empty_row = N - 1 - i; // 从下往上数,0开始
else arr[k++] = board[i][j];
}
for (int i = 0; i < k - 1; i++)
for (int j = i + 1; j < k; j++)
if (arr[i] > arr[j]) inv_count++;
// N=4是偶数,判断公式: (逆序数 + 空格行号) % 2 == 0 ? (假设目标是顺序)
// 目标状态逆序数为0。
return (inv_count % 2 == 0) == (empty_row % 2 == 1) ? 0 : 1;
}
// --- 可视化与输出 ---
void print_board(int board[N][N]) {
printf("+----+----+----+----+\n");
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (board[i][j] == 0) printf("| ");
else printf("| %2d ", board[i][j]);
}
printf("|\n+----+----+----+----+\n");
}
}
void visualize_path(Node* end_node) {
Node* path[1000];
int count = 0;
Node* curr = end_node;
while (curr != NULL) {
path[count++] = curr;
curr = curr->parent;
}
printf("\n搜索完成!最优步数: %d\n", count - 1);
printf("按回车键开始播放解题过程...\n");
getchar(); getchar();
for (int i = count - 1; i >= 0; i--) {
system(CLEAR_CMD);
printf("步骤: %d / %d\n", count - 1 - i, count - 1);
printf("G(代价): %d, H(预估): %d, F: %d\n", path[i]->g, path[i]->h, path[i]->f);
print_board(path[i]->board);
SLEEP_MS(600); // 暂停 600ms
}
}
// --- A* 主算法 ---
void solve_astar(int start_board[N][N], int heuristic_type) {
if (!is_solvable(start_board)) {
printf("错误:该局面不可达(无解)!\n");
return;
}
MinHeap heap;
heap.size = 0;
memset(visited, 0, sizeof(visited));
Node* start_node = (Node*)malloc(sizeof(Node));
memcpy(start_node->board, start_board, sizeof(start_node->board));
// 寻找空格位置
for(int i=0; i<N; i++)
for(int j=0; j<N; j++)
if(start_node->board[i][j] == 0) { start_node->x=i; start_node->y=j; }
start_node->g = 0;
start_node->h = (heuristic_type == 1) ? calc_manhattan(start_node->board) : calc_misplaced(start_node->board);
start_node->f = start_node->g + start_node->h;
start_node->parent = NULL;
start_node->hash = get_hash(start_node->board);
push(&heap, start_node);
visited[start_node->hash] = start_node; // 简单标记
int nodes_expanded = 0;
printf("开始搜索... (策略: %s)\n", heuristic_type == 1 ? "曼哈顿距离" : "不在位棋子");
while (heap.size > 0) {
Node* current = pop(&heap);
nodes_expanded++;
// 检查是否到达目标 (曼哈顿距离为0即为目标)
if (current->h == 0) {
printf("找到解!共扩展节点数: %d\n", nodes_expanded);
visualize_path(current);
return;
}
// 拓展节点
for (int i = 0; i < 4; i++) {
int nx = current->x + dx[i];
int ny = current->y + dy[i];
if (nx >= 0 && nx < N && ny >= 0 && ny < N) {
Node* child = (Node*)malloc(sizeof(Node));
memcpy(child->board, current->board, sizeof(child->board));
// 交换
child->board[current->x][current->y] = child->board[nx][ny];
child->board[nx][ny] = 0;
child->x = nx;
child->y = ny;
child->g = current->g + 1;
child->h = (heuristic_type == 1) ? calc_manhattan(child->board) : calc_misplaced(child->board);
child->f = child->g + child->h;
child->parent = current;
child->hash = get_hash(child->board);
// 简单的重复检测 (实际应处理哈希冲突和更优路径更新)
// 这里如果哈希位已被占用且步数没更优,则跳过
if (visited[child->hash] != NULL) {
// 如果这里实现了更复杂的CloseList,需要比较g值
free(child);
continue;
}
visited[child->hash] = child;
push(&heap, child);
}
}
}
printf("搜索结束,未找到解(或内存不足)。\n");
}
int main() {
// 测试用例:打乱的局面 (大致需要 20-30 步)
int start_board[N][N] = {
{1, 2, 3, 4},
{5, 6, 0, 8},
{9, 10, 7, 12},
{13, 14, 11, 15}
};
// 另一个稍微难一点的测试用例
// int start_board[N][N] = {
// {5, 1, 2, 4},
// {9, 6, 3, 8},
// {13, 15, 10, 11},
// {14, 0, 7, 12}
// };
printf("初始局面:\n");
print_board(start_board);
// 1 代表曼哈顿距离 (推荐),2 代表不在位棋子数
solve_astar(start_board, 1);
return 0;
}3. 分析:A* 算法与代价函数的关系#
在 A* 算法中,启发函数 的选择直接决定了搜索的效率和结果的最优性。
A. 不同启发策略的比较#
| 策略 | 定义 | 性能分析 |
|---|---|---|
| 不在位棋子数 () | h_1(n) = \text{count}(board[i] \neq goal[i]) | 较差。它提供的信息太少,只知道有多少个错位,不知道错得有多远。搜索空间剪枝能力弱,扩展节点多。 |
| 曼哈顿距离 () | $h_2(n) = \sum | x_i - x{goal} |
B. 为什么 越接近真实距离越好?#
A* 的搜索效率取决于 接近真实代价 的程度:
- 可采纳性 (Admissibility): 只要 (即不“高估”代价),A* 就能保证找到最优解(最短路径)。
- 和 都没有高估(移动一次最多归位一个棋子,或者减少1点曼哈顿距离),所以都能找到最优解。
- 优势关系 (Dominance):
- 对于所有状态,。
- 数学上证明,如果 ,那么使用 扩展的节点数 必定少于或等于 使用 扩展的节点数。
- 结论: 在此问题中,曼哈顿距离是比不在位棋子数更“强”的启发函数。
4. 总结#
- 搜索建模:将棋盘状态视为节点,移动空格视为边,步数视为边的权重(均为1)。
- 核心难点:在于状态判重(防止走回头路)和启发函数设计(防止搜索空间爆炸)。代码中使用了哈希映射来记录已访问状态。
- 结果:使用曼哈顿距离作为启发函数,即使在普通的 PC 上,也能在毫秒级内解决大多数 15 数码问题;而使用“不在位棋子”策略,对于稍微复杂的局面可能会因为节点过多而非常慢。
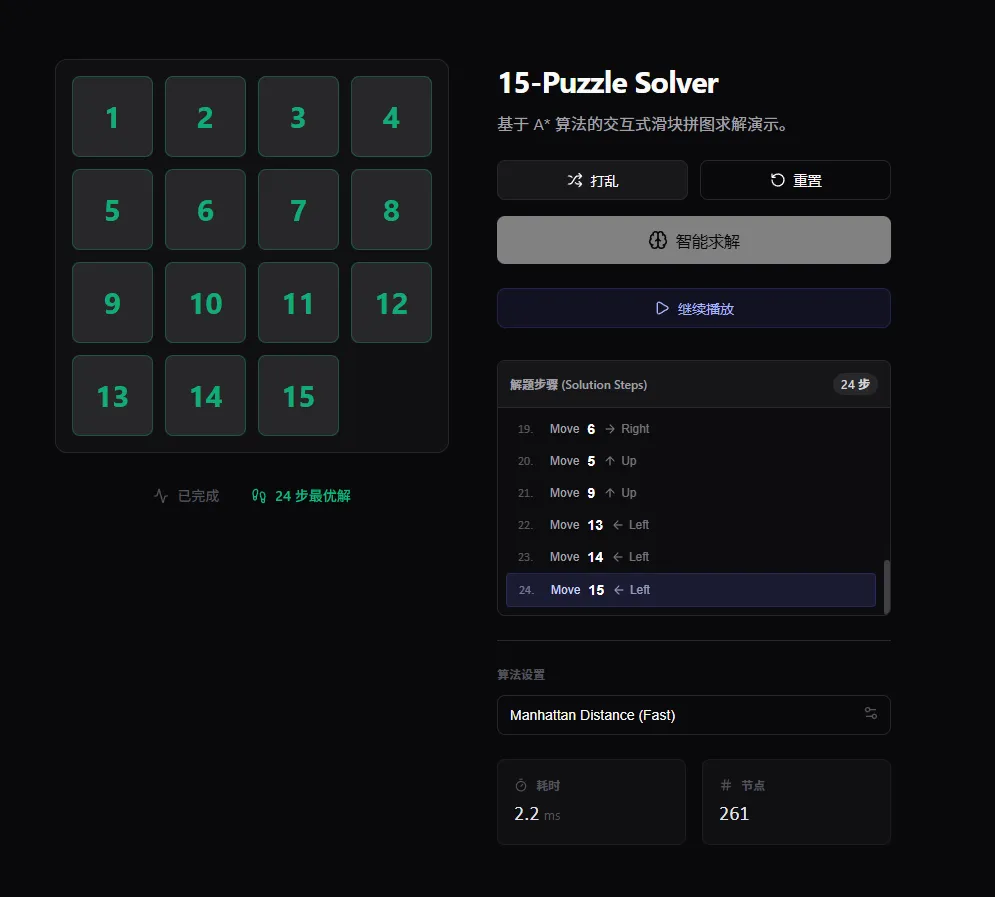
5. 附:可视化示例#
请访问示例网站:https://15puzzle-coral.vercel.app/ ↗ (可能需要梯子)
并且对于过于复杂的打乱情况做了舍弃。
6. 附:测试用例#
将 main 函数中的 start_board 替换为以下数组进行测试。
第一组:基础功能测试#
这组测试用于验证程序逻辑是否正确,包括“一步到位”和“无解判断”。
1. 极简测试 (1步可达)#
这是最简单的局面,用于测试程序是否能正常启动并识别目标。
// 预期结果:最优步数 1,扩展节点数极少
int start_board[N][N] = {
{1, 2, 3, 4},
{5, 6, 7, 8},
{9, 10, 11, 12},
{13, 14, 0, 15} // 仅最后一行 15 和 0 交换了
};2. 无解测试 (不可达局面)#
用于验证 is_solvable 函数的奇偶性校验逻辑。
// 预期结果:程序提示“错误:该局面不可达(无解)!”并直接退出
// 原理:交换了 14 和 15,逆序数变化,但空格位置不变,导致奇偶性无法匹配
int start_board[N][N] = {
{1, 2, 3, 4},
{5, 6, 7, 8},
{9, 10, 11, 12},
{13, 15, 14, 0}
};第二组:启发策略性能对比测试 (重点)#
这是本次实验的核心。我们需要一个中等难度(约 15-20 步)的局面。在这个难度下,两种启发函数的性能差异会非常明显。
测试局面:
int start_board[N][N] = {
{2, 10, 3, 4},
{1, 0, 6, 8},
{5, 9, 7, 12},
{13, 14, 11, 15}
};实验步骤:
- 修改
solve_astar(start_board, 2);(使用 不在位棋子数)。记录输出的“共扩展节点数”。 - 修改
solve_astar(start_board, 1);(使用 曼哈顿距离)。记录输出的“共扩展节点数”。
预期数据对比:
| 启发策略 | 预估最优步数 | 扩展节点数 (近似值) | 耗时感受 | 分析 |
|---|---|---|---|---|
| 不在位棋子数 | 18-20 步 | > 10,000 | 可能会有明显卡顿 | 启发性弱,搜索像无头苍蝇,走了很多冤枉路。 |
| 曼哈顿距离 | 18-20 步 | < 1,000 | 瞬间完成 | 启发性强,方向感好,紧紧锁定目标。 |
结论: 曼哈顿距离在这个问题上具有压倒性优势,因为它包含的信息量(距离)远大于简单的“是否在位”。
第三组:高难度压力测试#
用于测试 A* 算法在有限内存(代码中定义了 MAX_NODES 500000)下的极限。
复杂局面 (约 25-30 步)#
// 这是一个相对混乱的局面,需要较长的步骤还原
int start_board[N][N] = {
{6, 4, 7, 1},
{5, 0, 3, 2},
{9, 10, 14, 8},
{13, 15, 11, 12}
};- 注意: 对于这种难度,必须使用曼哈顿距离 (type 1)。如果使用“不在位棋子数”,程序基本会因为节点池耗尽(超过 50 万个节点)而崩溃或报错。